CONTENIDO
- Objetivo
- Descripción del proceso
- Elementos empleados
- Elementos de seguridad
- Funcionamiento de la celda
- Programación Work Visual
- Simulación de la celda
- Archivos descargables
1. Objetivo:
El objetivo del proyecto es la realización del mecanizado de
piezas por medio de dos robots KUKA KR6 con sus controladores KR4C y tres máquinas de CNC, fresadoras y torno.
Para
ello realizaremos el diseño, montaje y la implantación de una célula robotizada
utilizando el programa KUKA Sim Pro 1.1.
2. Descripción del proceso:
En este proceso industrial se pretende convertir piezas cilíndricas metálicas homogéneas en piezas mecanizadas para un posterior uso en otra aplicación industrial.
Esta tarea de mecanizado será llevada a cabo por máquinas de control numérico que irán modificando la pieza inicial hasta que al final da la linea de producción obtengamos la pieza deseada.
2. Descripción del proceso:
En este proceso industrial se pretende convertir piezas cilíndricas metálicas homogéneas en piezas mecanizadas para un posterior uso en otra aplicación industrial.
Esta tarea de mecanizado será llevada a cabo por máquinas de control numérico que irán modificando la pieza inicial hasta que al final da la linea de producción obtengamos la pieza deseada.
El transporte de las piezas entre máquinas será posible gracias a los dos robots y a las cintas transportadoras situadas en el interior de la celda.
3. Elementos empleados:
- Dos robots KUKA KR6 - 2


- 2 Controladoras específicas de la marca alemana KUKA (KRC4) para llevar a cabo la programación y control de cada uno de los robots de forma independiente.

- Uno de estos robots irá suspendido en un pórtico con el fin de ahorrar espacio y mejorar los tiempos de producción.


- Una guía lineal.

- Tres máquinas de control numérico distintas (CNC).



- Garra de doble pinza con 3 dedos.

- Tres tipos de piezas; desde la inicial hasta la final.



4. Elementos de seguridad
Para garantizar que la producción normal de la linea se lleve a cabo, se necesitan los siguientes elementos de seguridad que evitarán poner en peligro a los operarios.
- Seta Paro de Emergencia: detiene el funcionamiento de todos los elementos que componen la linea mediante un corte en la alimentación del sistema.


- Barreras: la célula está rodeada de un perímetro metálico que aísla la zona de trabajo para que nadie salvo el personal autorizado pueda penetrar e intervenir en el funcionamiento de sus elementos.

- Puertas de seguridad: Se usan para poder acceder a la linea. Cuando un operario autorizado abre alguna de ellas, desconecta el final de carrera con lo cual se corta la alimentación al sistema.

Barreras láser: están situadas en la zona de carga y salida de piezas para que detengan el sistema si se atraviesan.

- Balizas de señalización; a través de sus indicadores luminosos nos darán información acerca de posibles violaciones en el sistema de seguridad de la celda.

- Extintor adecuado según normativa de prevención de riesgos laborales en cuestión de incendios y zonas con atmósferas peligrosas.

5. Funcionamiento de la celda:
.Las piezas llegarán por la cinta que se encuentra en la ZONA A. Un robot KUKA KR6 montado en un eje externo lineal y equipado con una pinza doble (empleada debido al incremento de la rapidez en el proceso) que introducirá estas piezas en la primera máquina de cnc.
Después de esto, manda 4 piezas hasta el siguiente robot KR6 situado en la ZONA C, el cual se encargará de introducir las piezas en la máquina de CNC encargada de perforar con un diámetro pequeño. Al acabar de ser perforadas las piezas, este mismo robot las llevará a la cinta de salida que se encuentra también en la ZONA C.
Cuando el primer robot envía las 4 piezas por la cinta transportadora, coge otras dos y las lleva a la 3ª máquina de CNC mediante un eje lineal externo, donde se hará la perforación de las piezas con el diámetro más grande; una vez finalizado esto, llevará las piezas hasta la cinta de salida de piezas situada en la ZONA B.
El proyecto se repetirá en modo de bucle; es decir, se procesarán de 8 en 8 piezas, 4 hacia una salida y otras cuatro hacia otra.









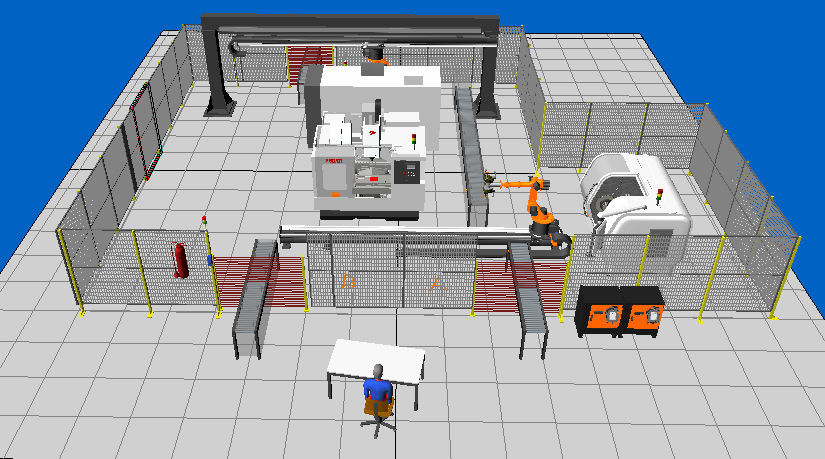
7. Simulación de la celda
6. Programación Work Visual





6.2 Programación del Robot que trabaja en la ZONA C:



7. Simulación de la celda
{kind=link}
8. Archivos descargables
Archivo VCM =) Proyecto_MáquinasCNC
Archivo SRC robot 1 =) Robot1.src
Archivo DAT robot 1 =) Robot1.dat
Archivo SRC robot 2 =) Robot2.src
Archivo DAT robot 2 =) Robot2.dat
Archivo MP4 (video) =) Proyecto_MáquinasCNC.mp4
No hay comentarios:
Publicar un comentario